|
I work on robot learning on the Atlas team at Boston Dynamics. I received my Ph.D. in EECS at MIT, advised by Professor Alberto Rodriguez and Professor Pulkit Agrawal. I'm interested in robot manipulation and physical interaction. I was fortunate to be supported by the NSF GRFP. I received my S.M. in EECS from MIT and my B.S. in Mechanical Engineering from UC San Diego, where I worked with Professor Michael Yip. I have also spent time as a research intern at Disney Research Los Angeles and NVIDIA's Seattle Robotics Lab |
.jpg)
|
|
I'm currently interested in machine learning for perception-driven planning and control, applied to problems in robot manipulation and physical interaction. The goal is to equip robots with reusable manipulation skills, through a combination of effective perceptual representations and reactive behaviors. Previously, I have studied the design, modeling, and control of inherently compliant artificial muscle actuators. |
|
|
|
Lars Ankile, Anthony Simeonov, Idan Shenfeld, Marcel Torne, Pulkit Agrawal ICRA, 2025 project page A BC + RL pipeline for precise manipulation tasks like assembly. Fine-tuning BC-trained policies with action chunking and diffusion de-noising requires specialized RL methods. We simplify such RL fine-tuning with simple residual policies trained with PPO. |
|
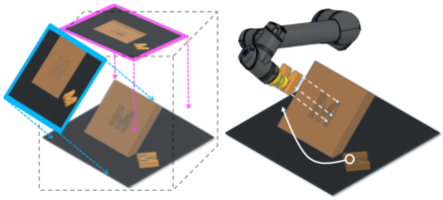
Marcel Torne, Anthony Simeonov, Zechu Li, April Chan, Tao Chen, Abhishek Gupta*, Pulkit Agrawal*(*equal advising) RSS, 2024 project page Learning robust manipulation policies by combining real-world imitation learning and reinforcement learning in simulation. RL in sim uses digital twin assets that reflect the geometry, appearance, and kinematics of the target deployment scene. |
|
Lars Ankile, Anthony Simeonov, Idan Shenfeld, Pulkit Agrawal IROS, 2024 project page A pipeline for learning image-based policies for precise, long-horizon assembly tasks from a small number of demonstrations by combining expressive policy architectures and various techniques for dataset expansion |
|
Meenal Parakh*, Alisha Fong*, Anthony Simeonov, Tao Chen, Abhishek Gupta, Pulkit Agrawal(*equal contribution) ICRA, 2024 project page An LLM-based task planner that can learn new skills opens doors for continual learning. |
|
Anthony Simeonov, Ankit Goyal*, Lucas Manuelli*, Lin Yen-Chen, Alina Sarmiento, Alberto Rodriguez, Pulkit Agrawal**, Dieter Fox**(*equal contribution, **equal advising) CoRL, 2023 project page / code Performing 6-DoF relational rearrangement between objects and scenes. Iterative pose de-noising via diffusion helps handle multi-modality and local scene cropping improves generalization. |
|
Ethan Chun, Yilun Du, Anthony Simeonov, Tomás Lozano-Pérez, Leslie Kaelbling ICRA, 2023 project page / code Local point cloud encoders help 3D neural descriptor fields generalize to more diverse global shapes and improve robustness to occlusions |
|
Anthony Simeonov*, Yilun Du*, Lin Yen-Chen, Alberto Rodriguez, Leslie P. Kaelbling, Tomás Lozano-Pérez Pulkit Agrawal (*equal contribution) CoRL, 2022 project page / code Applying 3D neural descriptor fields in a pairwise fashion, to enable relational rearrangement with pairs of unseen objects in arbitrary poses. |
|
Lin Yen-Chen, Pete Florence, Andy Zeng, Johnathon T. Barron, Yilun Du, Wei-Chiu Ma, Anthony Simeonov, Alberto Rodriguez, Phillip Isola CoRL, 2022 project page NeRF enables synthesizing orthographic views from virtual camera poses, allowing search for 6-DoF placing actions represented by pixels in the rendered image (positions) and the camera pose used to generate the image (orientations) |
|
Anthony Simeonov*, Yilun Du*, Andrea Tagliasacchi, Joshua Tenenbaum, Alberto Rodriguez Pulkit Agrawal**, Vincent Sitzmann** (*equal contribution, order determined by coin flip. **equal advising) ICRA, 2022 project page / code A novel representation that models objects as 3D neural fields of descriptors. We apply this representation to enable pick-and-place on unseen objects in out-of-distribution poses from a small handful of demonstrations. |
|
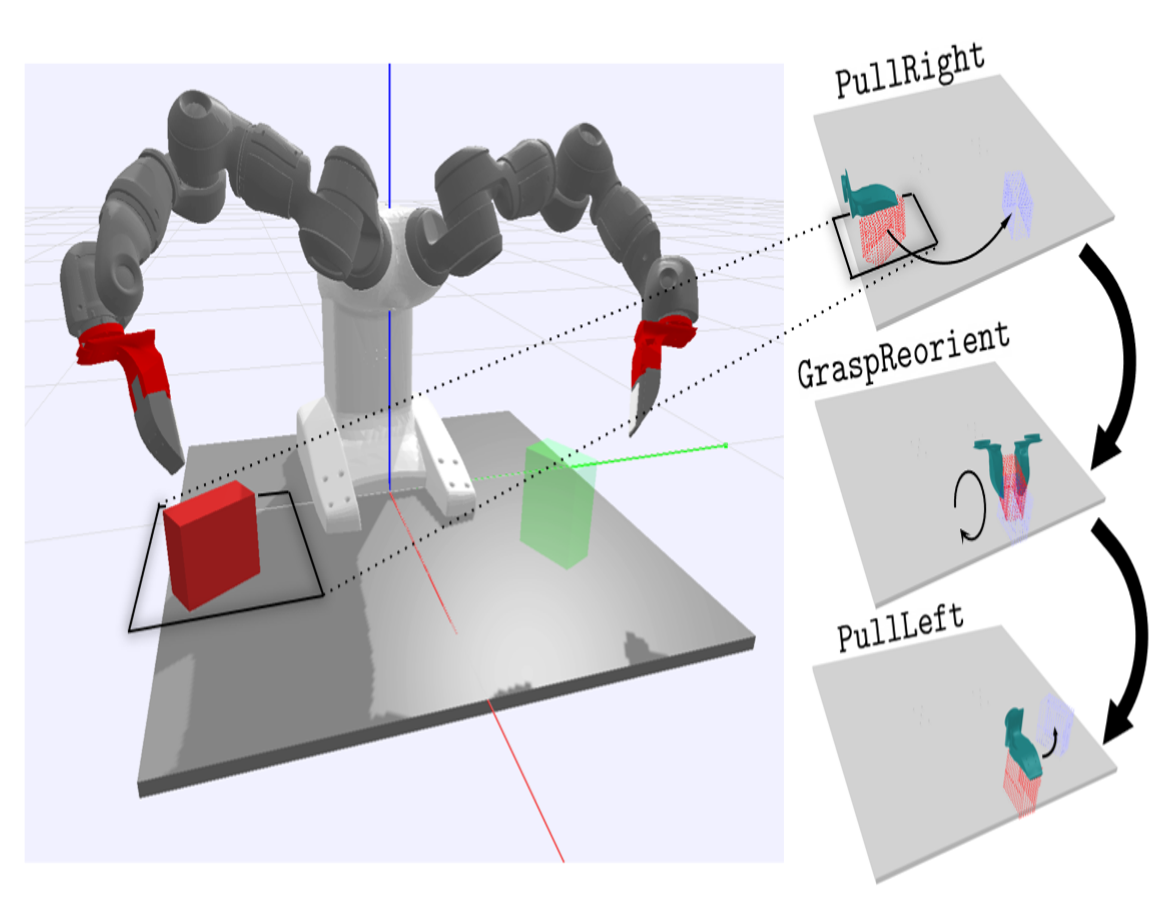
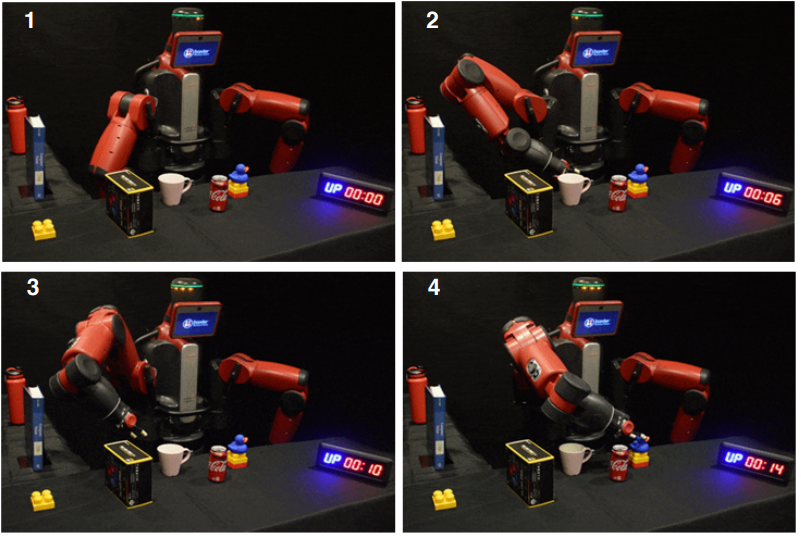
Anthony Simeonov, Yilun Du, Beomjoon Kim, Francois Hogan, Joshua Tenenbaum, Pulkit Agrawal, Alberto Rodriguez CoRL, 2020 project page A framework for solving long-horizon planning problems involving manipulation of rigid objects that operates directly from a point-cloud observation |
|
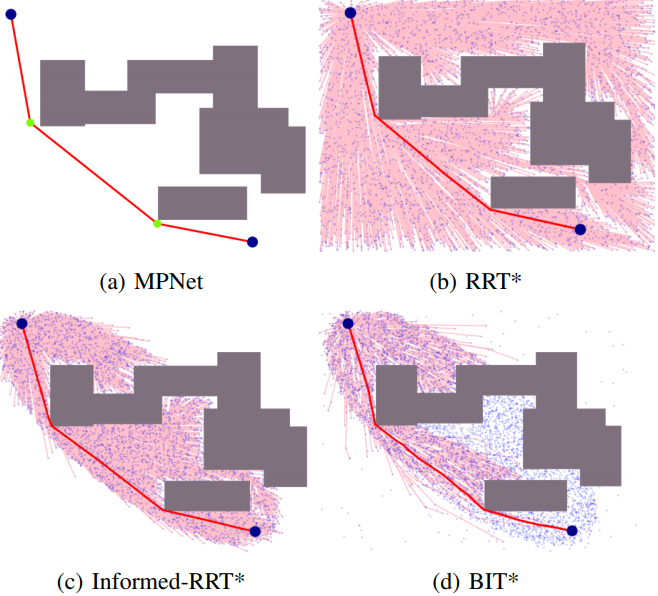
Ahmed Qureshi, Yinglong Miao, Anthony Simeonov, Michael C. Yip TRO, 2020 project page By encoding raw observations of obstacle geometry into a latent representation, we can distill the capabilities of an expensive planning algorithm into a neural network, allowing significant speedups in finding near-optimal collision-free paths. |
|
Ahmed Qureshi, Anthony Simeonov, Mayur J. Bency, Michael C. Yip ICRA, 2019 project page This paper is subsumed by our journal paper. |
|
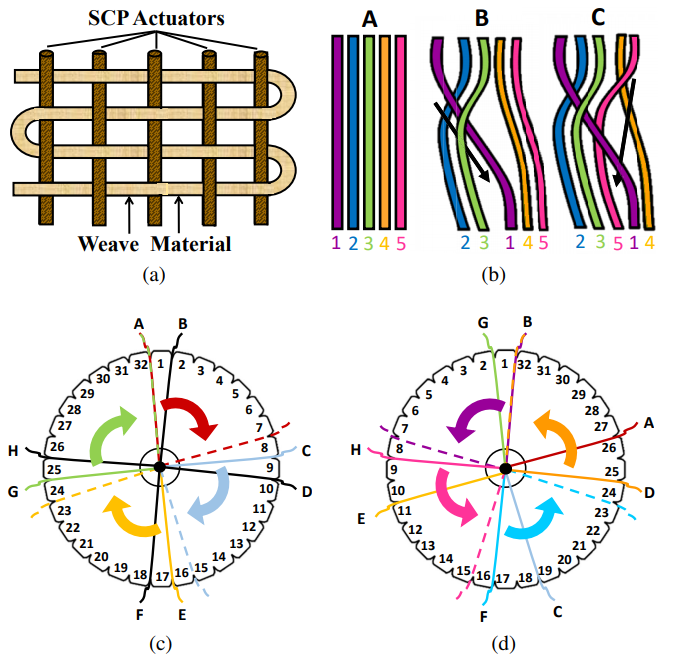
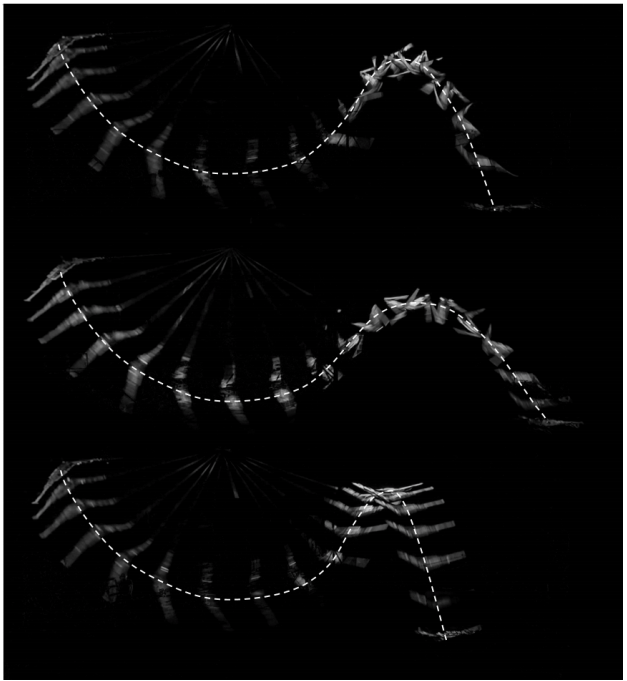
Anthony Simeonov, Taylor Henderson, Zixuan Lan, Guhan Sundar, Adam Factor, Jun Zhang, Michael C. Yip RA-L, 2018 Empirical study of the performance tradeoffs between different bundling techniques for thermally-driven, compliant artificial muscle actuators. |
|
Morgan T. Pope, Steven Christensen, David Christensen, Anthony Simeonov, Grant Imahara, Günter Niemeyer ICRA, 2018 We present a two DOF robot that is launched from a gravity-driven pendulum and executes a variety of mid-air stunts. The robot uses a combination of onboard sensors to perform state estimation and inform actuator timing. This research is part of the basis of Imagineering's Stuntronics project. |
|
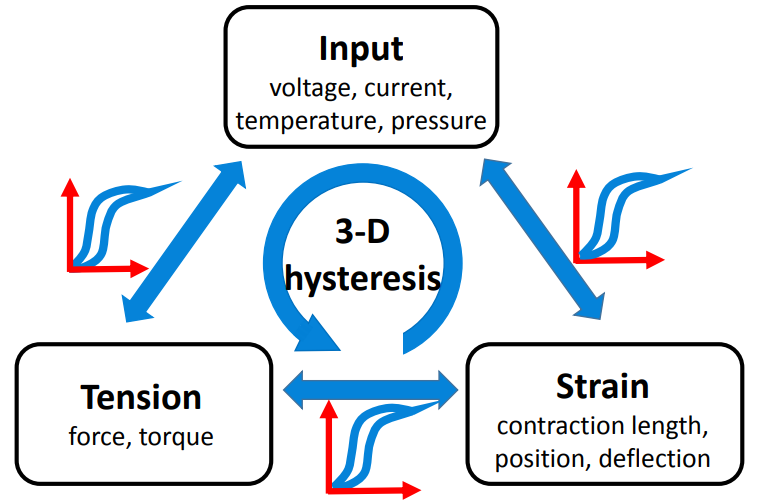
Jun Zhang, Anthony Simeonov, Michael C. Yip Smart Materials and Structures, 2018 A new modeling scheme for capturing the coupled hysteresis between tension, strain, and input, which is used for improved control of artificial muscle actuators. |
|
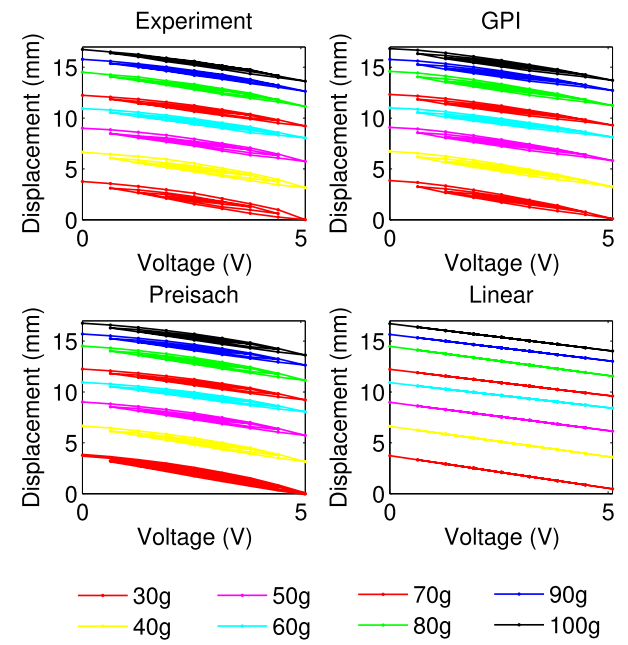
Jun Zhang, Kaushik Iyer, Anthony Simeonov, Michael C. Yip RA-L, 2017 We propose three new models for characterizing the hysteresis present in super-coiled polymer artificial muscles, and demonstrate their use for accurate open-loop control. |
|
|
|
|
Anthony Simeonov, Yilun Du, Beomjoon Kim, Francois Hogan, Pulkit Agrawal, Alberto Rodriguez, RSS 2020 Workshops on Visual Learning and Reasoning for Robotic Manipulation, and Learning in Task and Motion Planning |
|
|